数字时序:时钟信号、抖动、迟滞和眼图
Contents
- 高电平,又称为1电平,是逻辑高电平的主值。逻辑高电平的计算值等于眼图周期20%处所捕获到的所有数据样本的平均值。
- 低电平,又称为0电平,是逻辑低电平的主值。这一电平的计算与高电平计算取相同区域。
- 眼图的振幅是指高电平与低电平之间的差值。
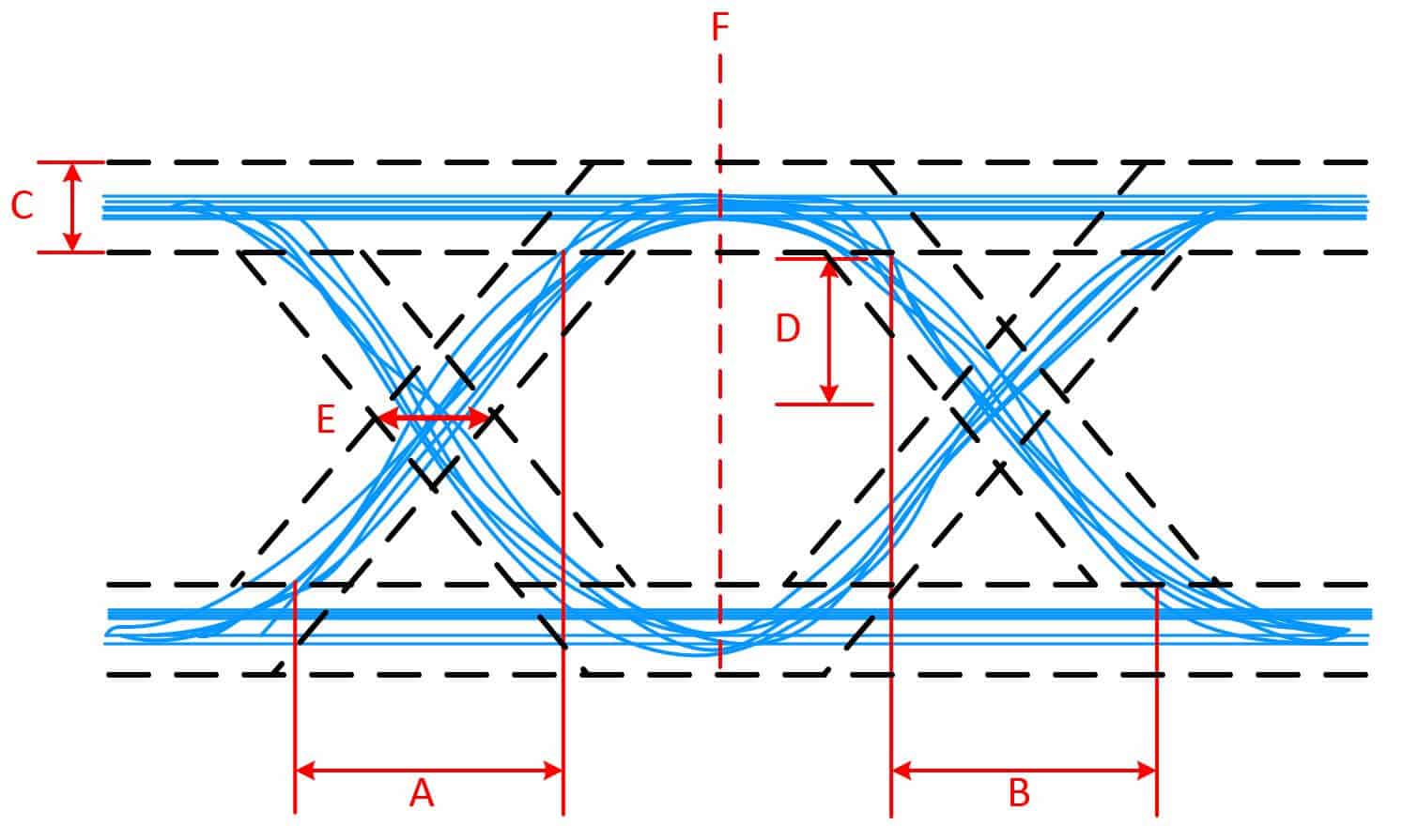
- 位周期又称为单位间隔(UI),它通过测量眼图中眼睛图交叉点的水平间距得到。它是数据速率的倒数。在生成眼图时,用单位间隔取代时间作为横轴坐标,就可以很容易地比较不同数据速率的眼图。
- 眼高是指眼图的竖直开口。理论上来讲,其值应该等于振幅,但是由于有噪声的存在,现实中这种理想情况几乎不会发生。同样地,在系统中噪声越大眼高就越小。眼高反应了信号的信噪比。
- 眼宽是指眼图的水平开口。它通过计算眼图交叉点统计平均值之间的差得到。
- 眼图交叉百分比是指占空比扭曲或脉冲对称问题。理想信号的眼图交叉百分比是50%;当百分比发生偏离,眼图会闭上,则表明信号完整度降低。
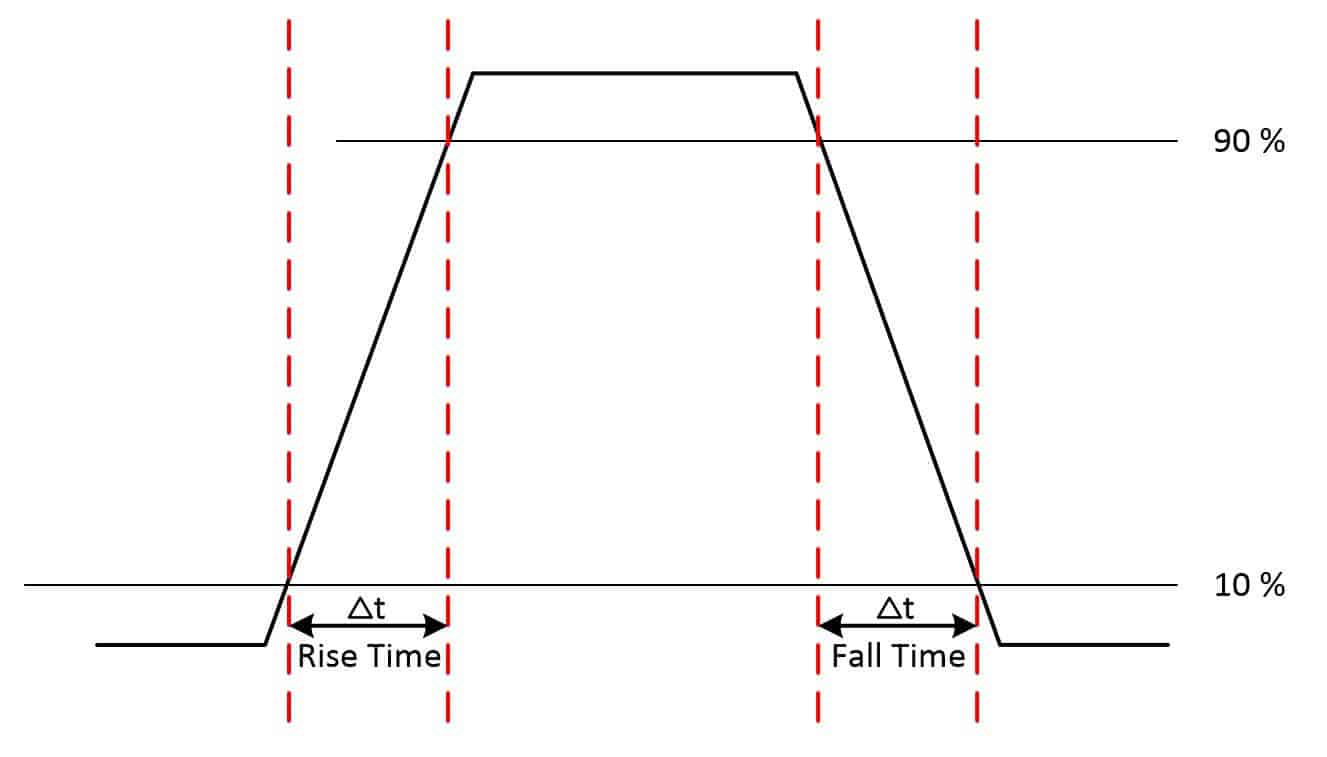
- 图中的上升时间是所有上升时间的平均值。斜率指对定时误差的敏感度,其值越小越好。
- 图中的下降时间是所有下降时间的平均值。斜率指对定时误差的敏感度,其值越小越好。
- 逻辑高电平的值宽是指信号的失真总量(由信噪比决定)。
- 采样点的信噪比是指从眼宽到底部的距离或者到逻辑高电压的距离。
- 信号的抖动。
- 当信噪比达到最佳值时眼图的开口达到最大,此时是采样的最佳时间。
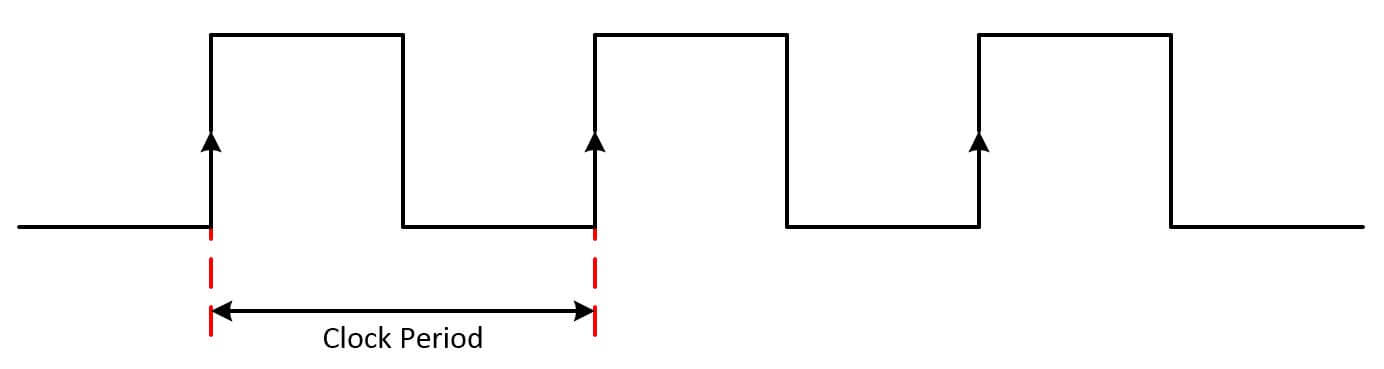
图1. 数字波形作为时钟信号的参考,时钟信号具有固定周期,在数据传输过程中用固定的时间间隔来同步数字信号发送器和接收器。
时钟信号的占空比是波形处于所占的时间比。图2展示了两个具有不同占空比的波形的区别,您可以发现占空比为30%的波形处于的时间少于占空比为50%的波形。
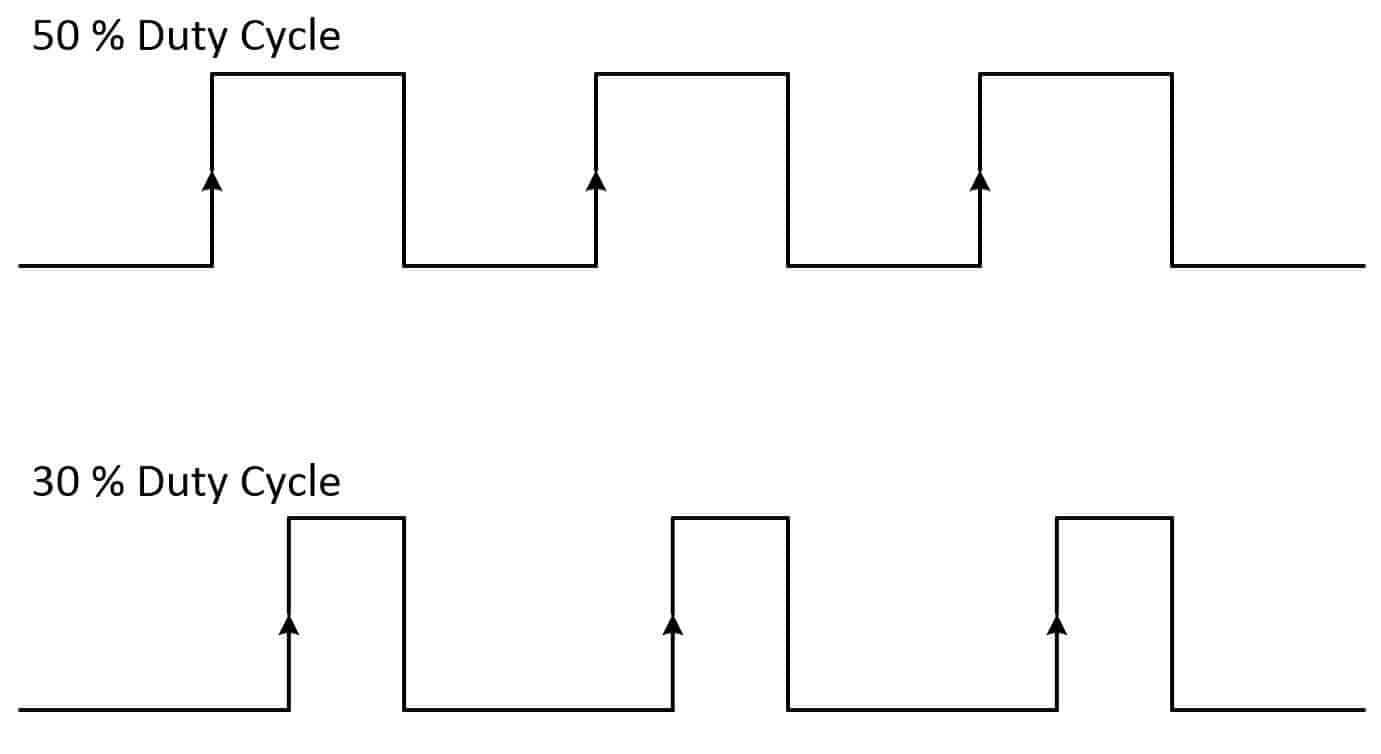
图2.信号的占空比是指波形处于的时间百分比。
时钟信号用于在数据传输过程中同步数字信号发送器和接收器。比如,发送器可以在时钟信号的每个上升沿发送一个数据位,接收器可使用相同的时钟读取数据。在这种情况下,设备的确定边沿是上升沿(从低电平到高电平)。对于其他设备则可能是下降沿(从高电平到低电平)。时钟的确定边沿又称为有效时钟边沿。数字信号发送器在每个有效时钟边沿触发新的数据发送,而接收器则在每个有效时钟边沿上进行采样。后来的设备开始同时使用时钟的上升沿和下降沿;这种设备被称为双倍数据速率传输(DDR)设备。事实上,数据传输对于有效边沿有短暂的短延;这种延时称为 clock-to-out time。
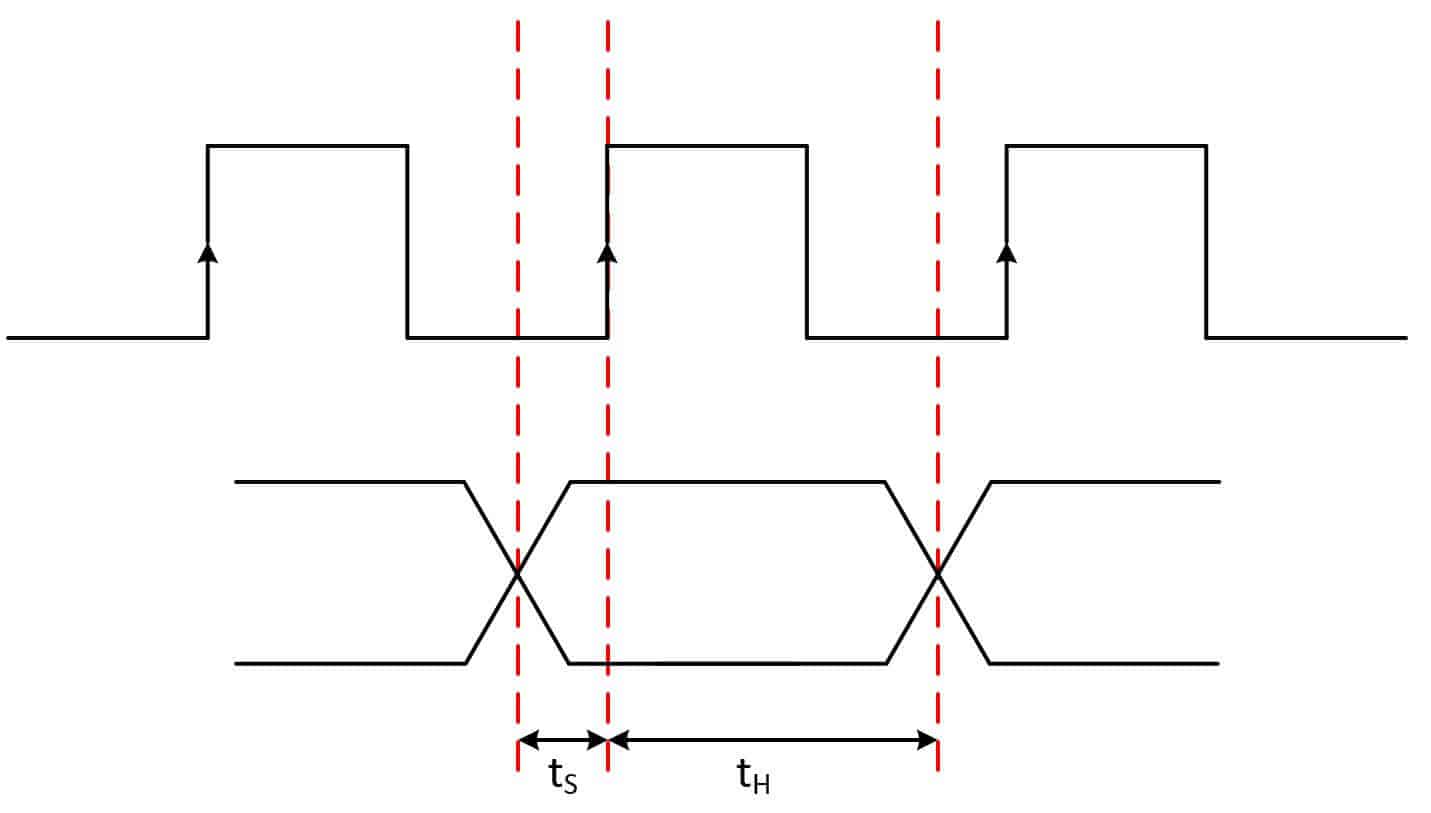
当接收器对数字线路上的数据进行采样时,知识兔需要注意两个时序参数,知识兔以确保接收数据的可靠性。建立时间(ts)是指数据连续处于有效逻辑电平且接收器准备好接收输入信号所需的时间。保持时间(tH)是指接收器采样后,数据发生变化前需要保持在原有状态的时间。建立时间和保持时间在接收器的时钟有效边沿附近形成了一个稳定的窗口,知识兔以便接收器能够可靠地采集数据。图3给出了一个上升沿时钟信号的建立时间和保持时间。通常,数字信号会在上升轨迹的中间切换电压;因此时间基准标志通常放置在信号边沿的正中央。
常用术语
在数字电路系统中,时序是最重要的因素之一。数字通信的可靠性和精确度均取决于时序的质量。然而,在实际应用中,任何事物都不是理想的。以下是一些可以帮助您理解特定数字信号时序功能的常用术语和方法。
现在,知识兔假设垂直线之间不是等距的。这样会使时钟信号的周期性不那么明显。当您绘制数据时,它们之间的间隔并不相同,因此看起来不正确。
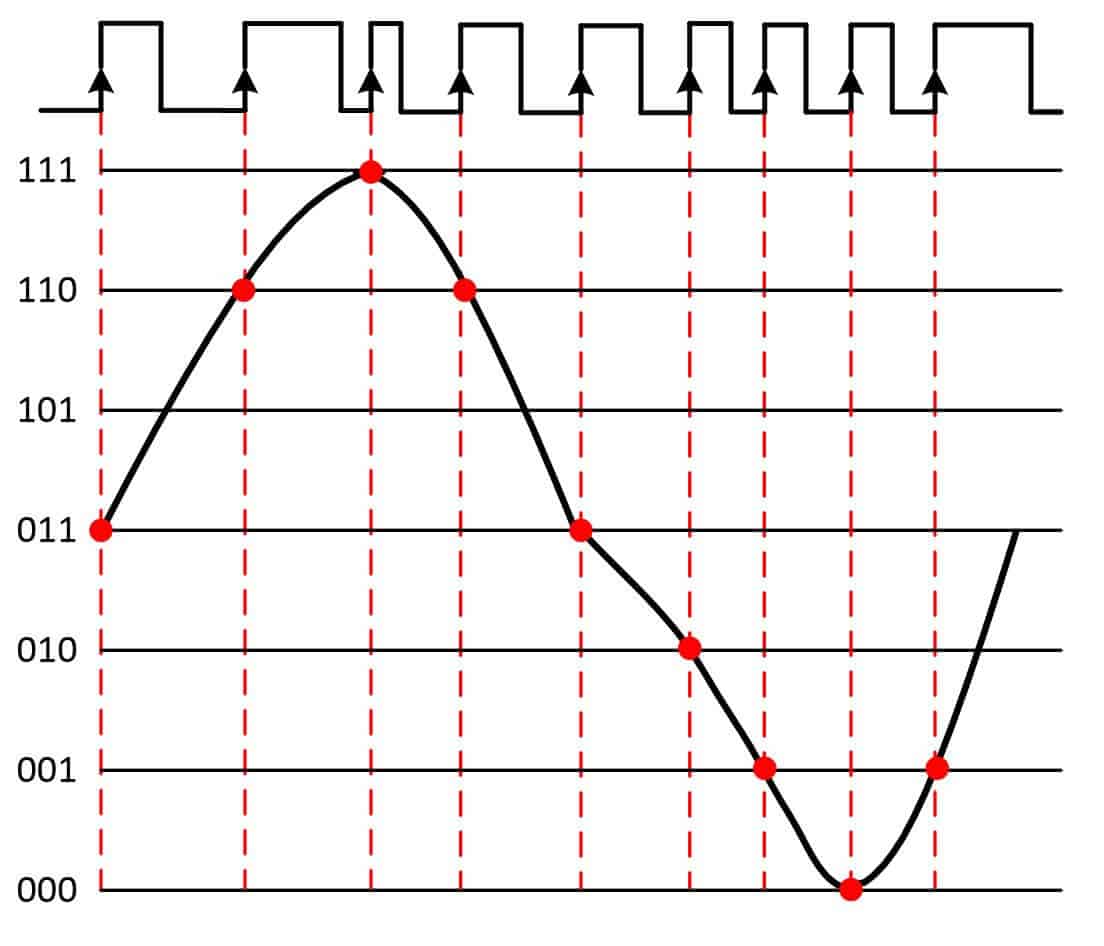
在图5中,您可以看到时钟信号电平的切换距离是不均匀的;这就是时钟的抖动。尽管上图抖动较为夸张,但是它说明了抖动的时钟会导致采样在不均匀的时间间隔上触发。这种不均匀导致要记录和复制的波形发生变形。
现在看看只有1和只有0的数字信号的抖动。请记住,抖动是指事件的理想时序与真实时序之间的偏差。请注意单脉冲,抖动是指实际信号边沿时序与理想时序位置的偏差。
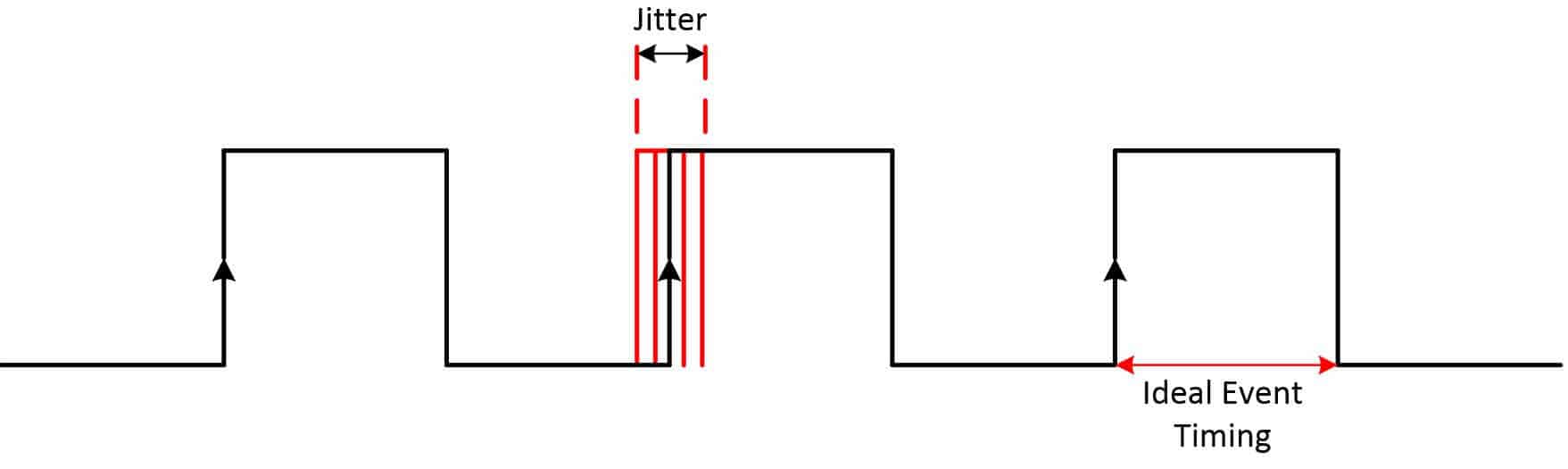
抖动通常从基准信号的过零点处测量。它通常来自于串扰、同步转换输出和其他定期发生的干扰信号。抖动会随着时间而发生改变,因此抖动的测量和量化可以是在秒级抖动范围内通过示波器进行目视估算,知识兔也可以是按统计学方法进行测量,比如标准差随时间的变化。
此外,在真实情况下,信号几乎不会达到电压电平并稳定地保持在该电平上。当信号在边沿之后超过电压电平时,峰值失真被称为过冲(overshoot)。如果知识兔信号在边沿之前超过了电压电平时,峰值失真被称为前冲(preshoot)。在边沿之间,如果知识兔信号漂移低于电压电平时,则称为下冲(undershoot)。
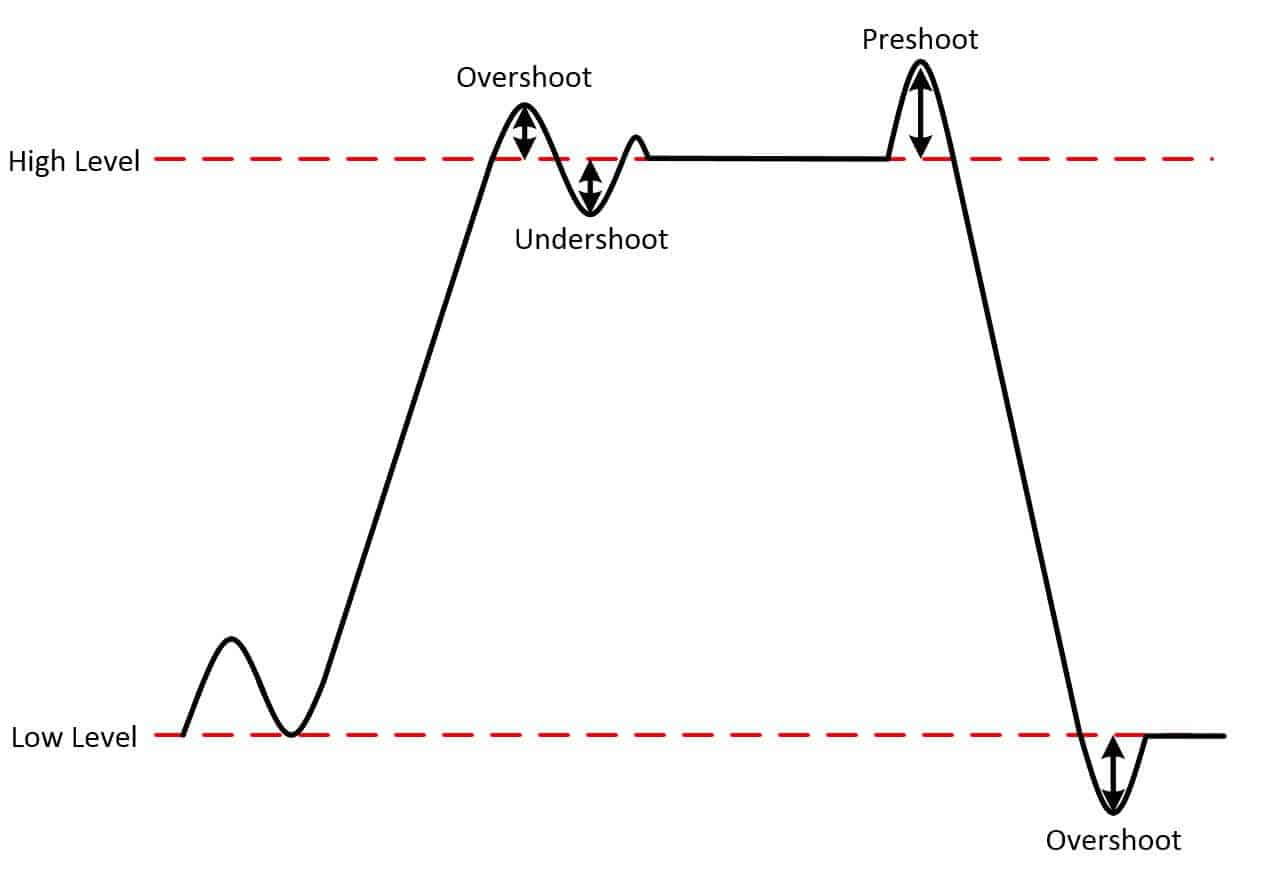
过冲、前冲和下冲统称为偏差。偏差的发生可能是由于电路板布局问题、不适当的端接或者半导体设备本身的质量问题。
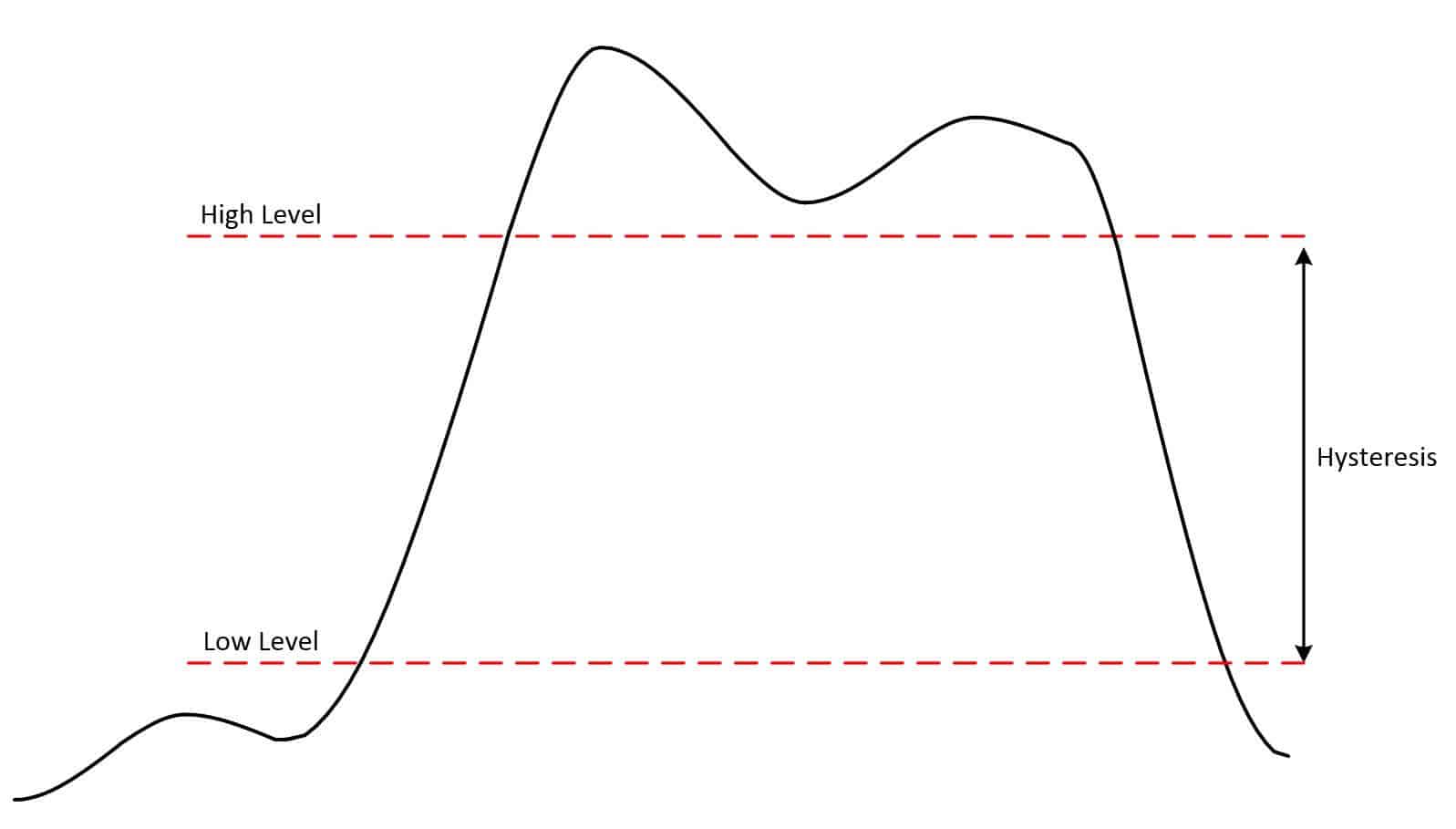
迟滞是一个有用的数字仪器属性,因为它可以帮助数字系统过滤掉一些高频率的噪声。这些噪声的产生通常是由于逻辑电平转换时的高边沿速率反射,如果知识兔某个电压阈值在逻辑状态下发生改变,那么这些噪声就会导致数字设备产生错误的电平转换探测。图11展示了这一现象。第一个样本作为逻辑低电平被捕获。第二个样本仍然是逻辑低电平,因为信号还没有达到高电平阈值。第三个和第四个样本是逻辑高电平,第五个是逻辑低电平。
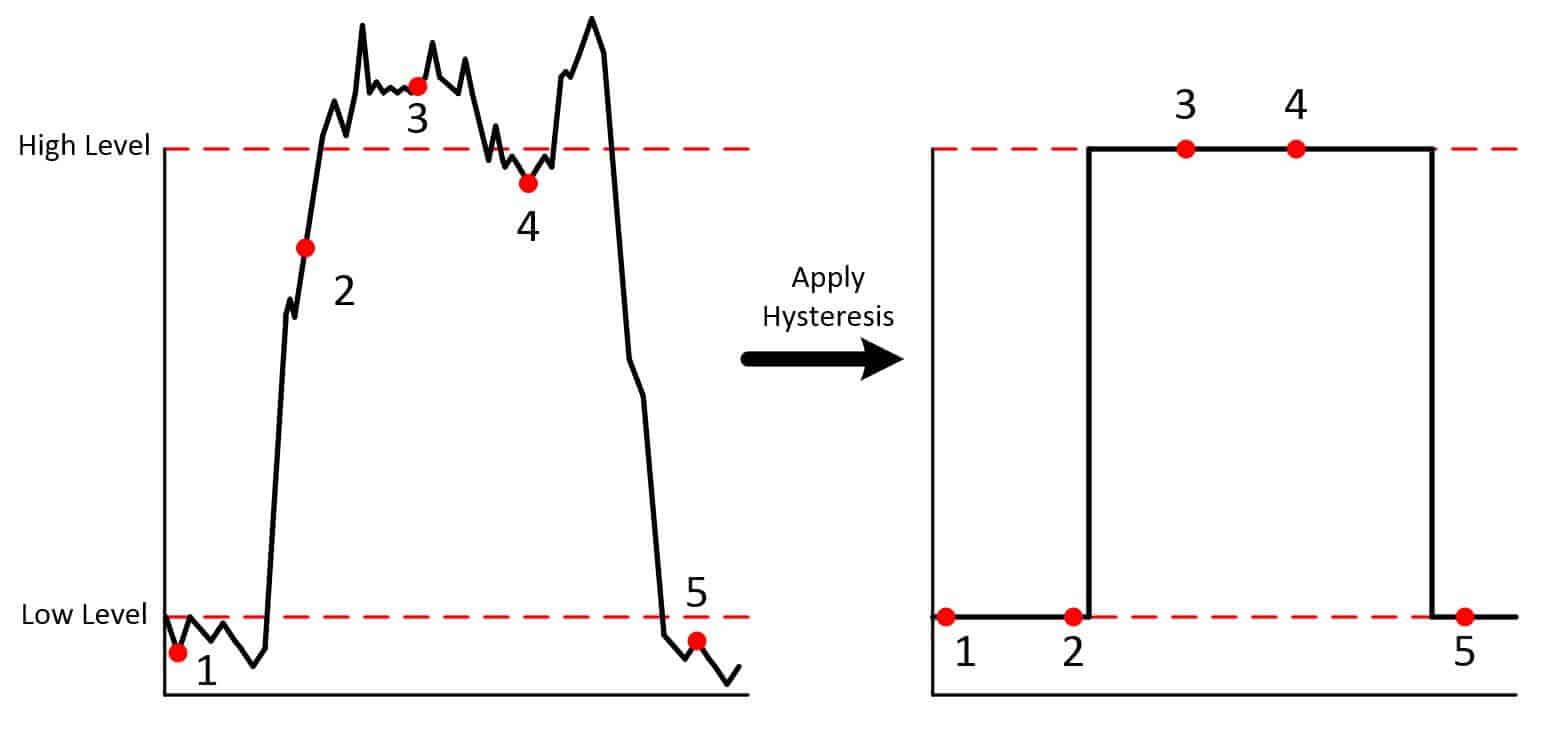
图11. 迟滞可以过滤掉数字系统中部分高频噪声。
对于具有恒定电压阈值的设备,系统的抗噪容量(NIM)和迟滞由用户选择的系统组件决定。系统NIM和迟滞都会让系统具有一定的抗噪水平,但是对于特定的逻辑系列,在这两者之间总是存在一定的取舍—迟滞越多,NIM就越小,反之亦然。在确定如何设置电压阈值时,您需要仔细检查系统的信号质量,并依此决定您是需要提高高电平和低电平(更大的NIM)时的抗噪性还是需要提转换(更多的迟滞)时的抗噪性。
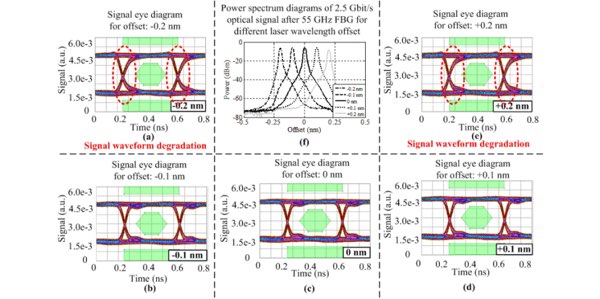
图13展示了眼图的常用术语。
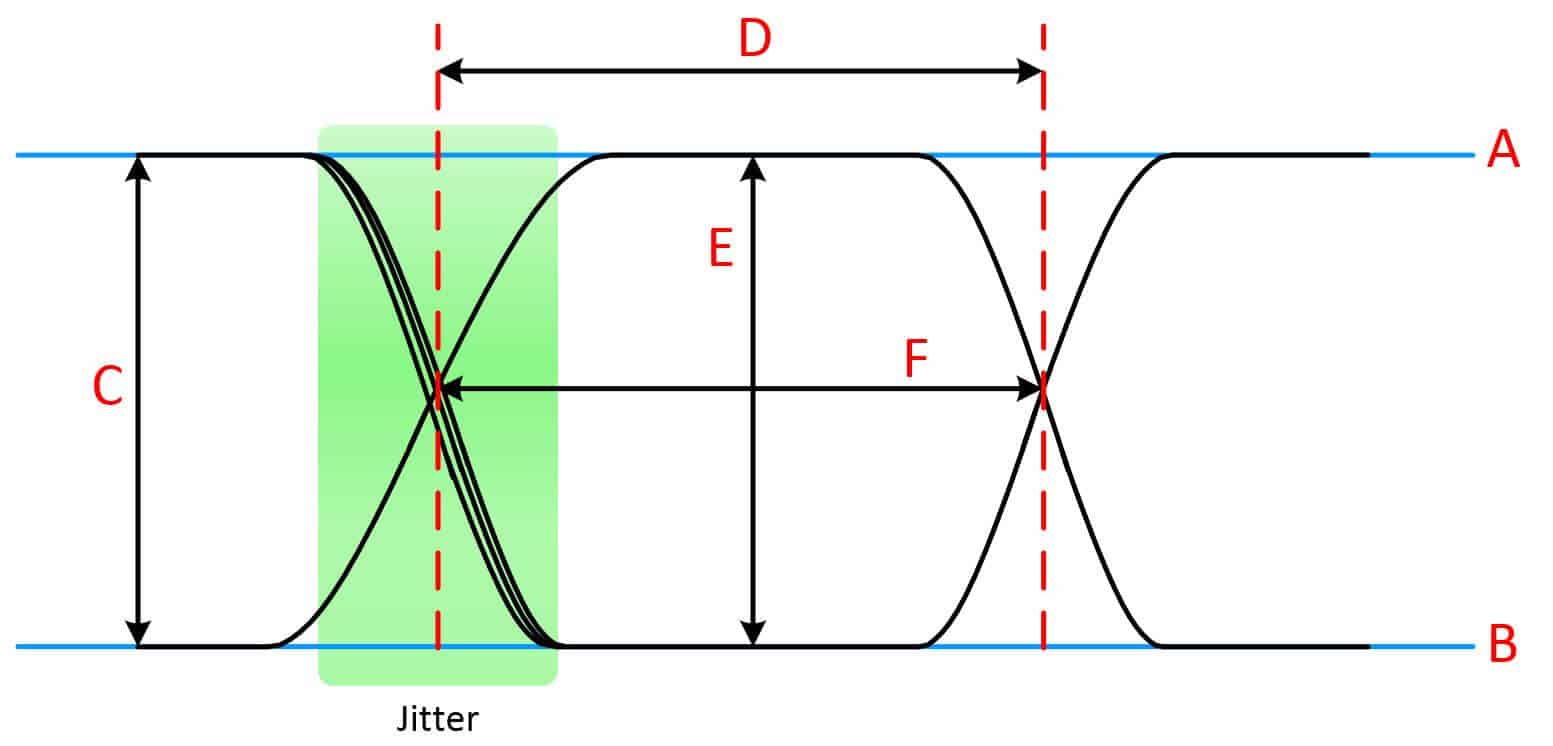
图14给出了实际眼图的其他测量值。
如何下载NI技术白皮书数字定时:时钟信号、抖动、迟滞和眼图
下载仅供下载体验和测试学习,不得商用和正当使用。