TI 77GHz 毫米波传感器的自动泊车系统参考设计
之前知识兔博文里有介绍特斯拉自研的AI处理器芯片,算力非常强大但还是不够用,为什么?因为需要处理的传感器数据是越来越多了,在特斯拉家的自动驾驶系统Autupilot还是1.0版本的时候,需要处理的传感器数据有:
- 一个前置摄像头
- 12个超声波传感器
- 一个前置雷达
- 一个后置倒车摄像头
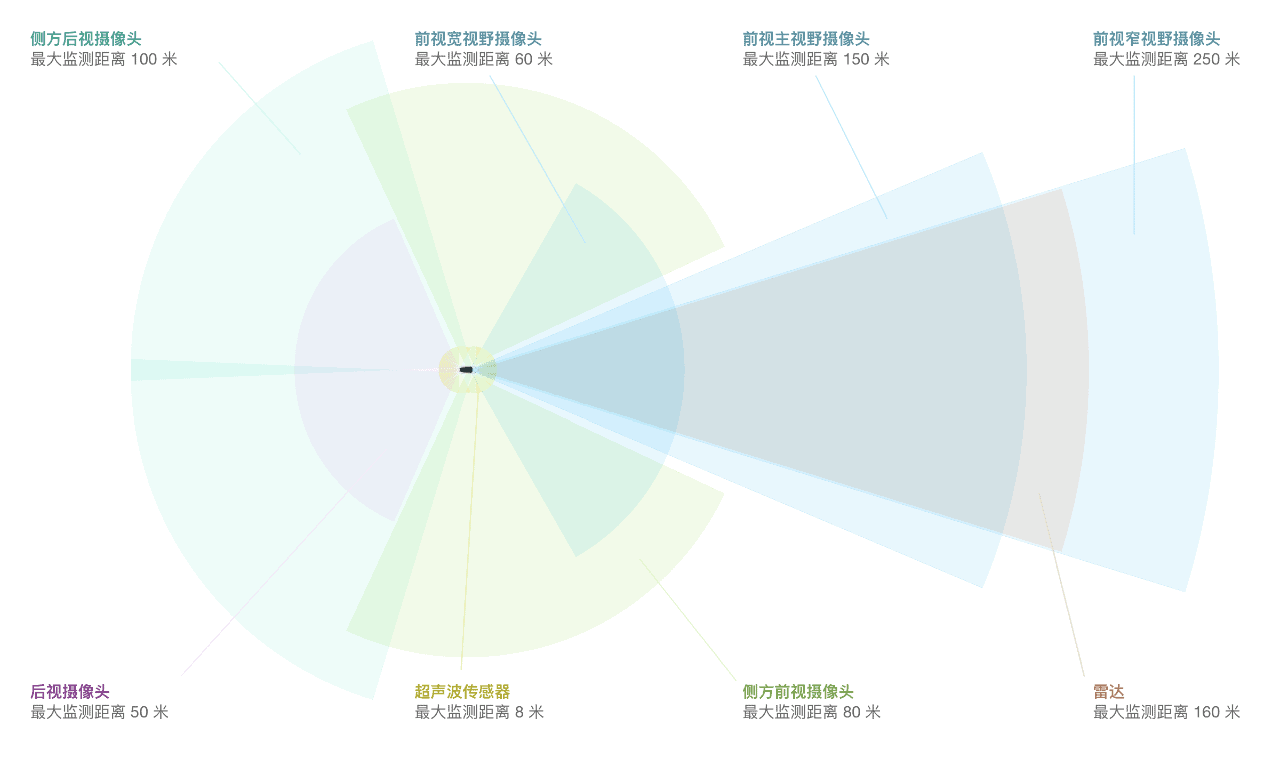
需要实现自动辅助驾驶或者未来的全自动驾驶,需要非常多的传感器为Autupilot分享路况判断的数据依据,目前版本的特斯拉环绕车身共配有 8 个摄像头,视野范围达 360 度,对周围环境的监测距离最远可达 250 米。12 个新版超声波传感器作为整套视觉系统的补充,可探测到柔软或坚硬的物体,增强版此外,特斯拉车前还有一个增强版的前向毫米波雷达,能够在恶劣的雨、雪、大雾、扬尘天气下工作,也能探测到前方车辆。
什么是「毫米波雷达」?
毫米波雷达,指的是工作在毫米波波段(millimeter wave)的雷达,通过天线发射毫米波,及接收障碍物反射回来的信号,来计算出与目标的相对速度、距离以及角度。
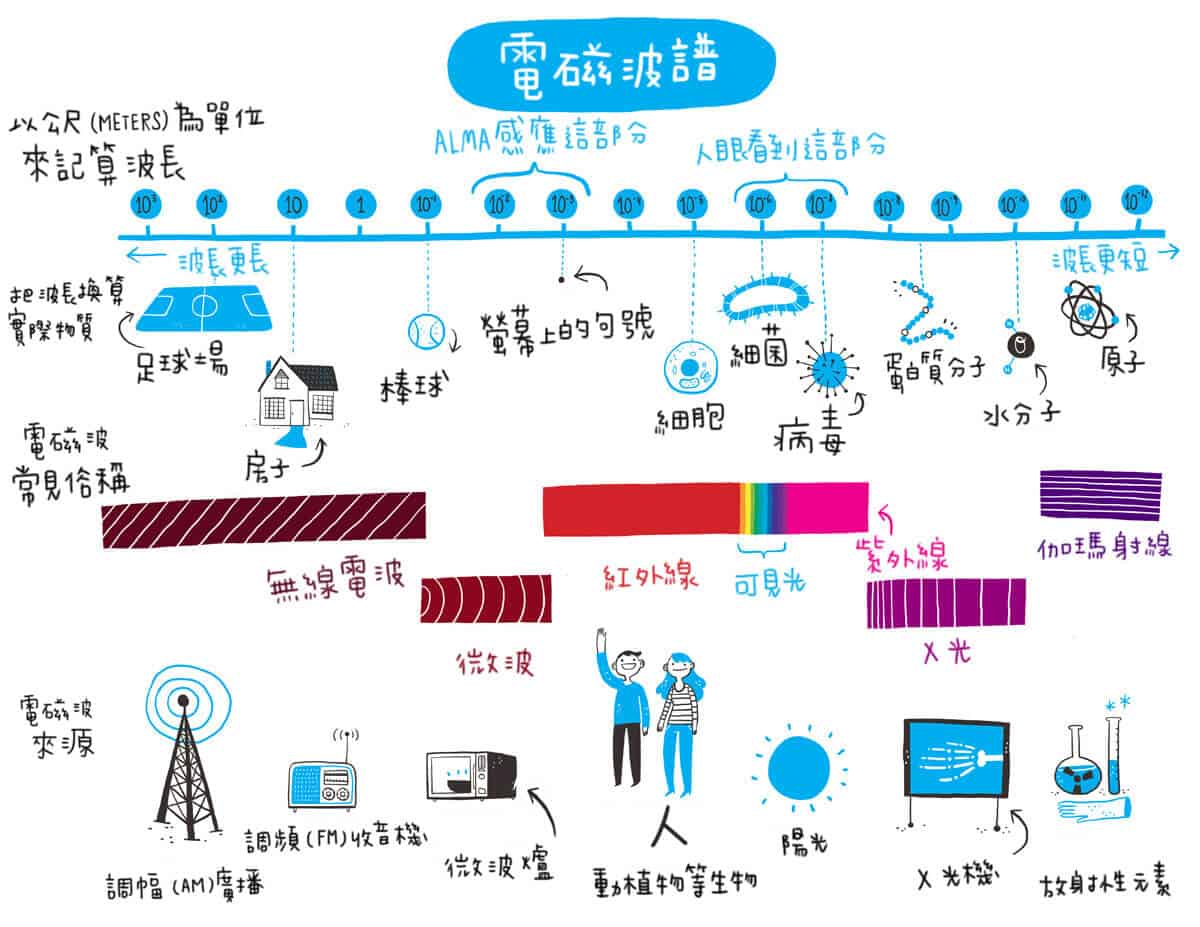
毫米波的波长是1cm到1mm之间,这个波长是很短的,它靠近太赫兹或者红外,但是比这两者的波长还长很多,这个波长早期开发起来难度很大,是近十年左右才利用起来的。
根据电磁频谱划分,毫米波的波段在30—300GHz区间,频率很高,但是这个频段里很多频率区域的电磁波在空气里传播很容易被水分子、氧气吸收,所以可用的就是几个典型的频段,也就是24、60、 77,、120GHz。当然24GHz很特别,他严格来讲不是毫米波,因为它的波长在1cm左右。但是它是最早被利用的。现在各个国家把24GHz划出来可以民用,77GHz划分给了汽车防撞雷达,24Ghz也在汽车里用得最早。
为什么自动驾驶要用到这么多种类的传感器
如文章开始知识兔所述,目前版本的特斯拉车身集成了一堆传感器,既有摄像头、又有超声波传感器,车头部位还有一个毫米波雷达,而特斯拉的主要竞争对手谷歌则主推激光雷达。
依前技术手段来看,并没有哪一类型的传感器可以应付所有场景,比如红外线、超声波雷达的价格虽然较低,但是可探测的距离过短;摄像机虽然可分辨障碍物的大小与颜色,但就像人类的眼睛一样,易受天气因素影响,雾霾或者下雪天能见度差,摄像头感测距离就不够安全。激光雷达虽然精准度高,但同样有天气因素制约,且目前价格过高,离大量普及还有一段时间。
由于毫米波雷达的距离远、可靠性高、不受光线、尘埃影响,相比摄像头,它距离150米以上的特性远远胜出。相比激光,较低的价格也占据优势,所以现在仍然是自动驾驶汽车的主流技术,未来发展前景也不错。
24GHz、60GHz、77GHz和79GHz车载毫米波雷达的发展
如前面所述,毫米波工作约介于30~300GHz的频段,但可用的就是几个典型的频段,也就是24、60、 77,、120GHz。虽然目前各国针对车载毫米波雷达所分配的频段各有不同,但主要还是集中于24GHz及77GHz,只有少数国家如日本则采用了60GHz频段。
2015年的世界无线电通信大会上,各国将77GHz频段划分为「车载高分辨率雷达频段」,因此77GHz瞬间成为国际标准。由于高频段的77GHz相对于24GHz具有诸多优势,也使得日本从60GHz逐渐转而开发77GHz的毫米波雷达。
整体看来,汽车毫米波雷达不断朝高精度需求发展,使得雷达系统持续从24GHz往77GHz、79GHz升级。知识兔可以预测,未来车载雷达频段将趋向76GHz~81GHz之间,最终以77GHz雷达作为长距通信的载体,79GHz作为短距通信的载体。
知识兔分享一份TI的 77GHz 毫米波传感器的自动泊车系统参考设计
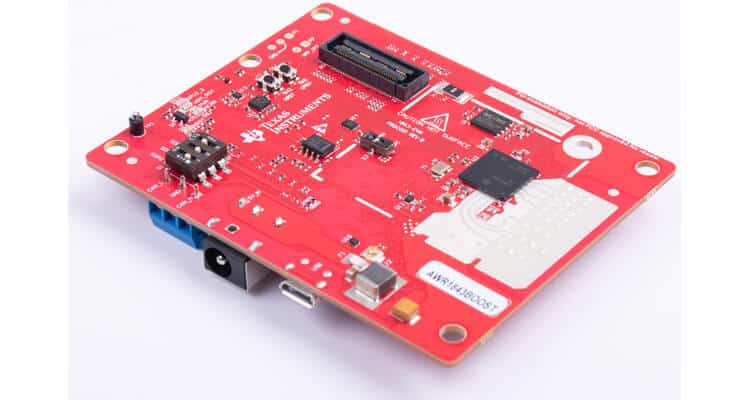
此参考设计展示了 AWR1843 作为一款自动停车传感器的使用。这是一款带有集成式 DSP、MCU 和硬件加速器的 77GHz 单芯片毫米波传感器,能够在苛刻的停车条件和环境条件下可靠地检测车辆周围的物体。凭借小于 4cm 的距离分辨率和 10MHz IF 的带宽,知识兔可以通过良好的分辨率检测高速移动的物体。评估套件配有一根天线,可实现方位角为 ±50°、仰角为 ±15º 的视场检测并实现从 4cm 到 40m 以上的检测距离。器件上分享了参考软件实现,可支持高分辨率物体检测及群集。分享了基于 MATLAB 的 GUI,可直观查看检测到的物体。
特性
- 展示77GHz 毫米波传感器技术在自动停车应用中的运用
- 检测距离超过40m,视场的方位角为 ±50°、仰角为 ±15°
- 基于毫米波软件开发套件(SDK) (MMWAVE-SDK) 的处理和检测源代码
- 基于成熟的EVM 硬件设计,可缩短上市时间并支持开箱即用演示
- 设计指南解释了用于实现可视化的处理链软件、算法和GUI
下载仅供下载体验和测试学习,不得商用和正当使用。