骨骼模拟插件下载 Maya生物肌肉骨骼模拟插件ziva vfx for maya 2022 V1.922 最新中文破解版(附破解文件+教程)
Ziva Vfx For Maya 2022是针对“Maya”软件而开发的一款生物肌肉骨骼模拟插件,有了它你将可以进入虚拟角色创作世界;并且知识兔,该插件还内置了创建仿真的生物肌肉骨骼所需的全部工具,比如在这之前角色仿真模拟环境只适用于游戏、动画、视觉特效制作;功能比较单一;但是自从该插件的问世,现在可以轻松将植物和无生命的物体,比如自然界中的树木、桥梁、高楼大厦等,甚至连流动的水、沙滩球这样极其容易变形的物体也能轻松驾驭!并且知识兔,经过程序创作出来的“生物”在某种意义上已经和现实无差别,知识兔从现实世界中的人类和动物、植物,甚至是到你想象中的神奇野兽现在都可以虚拟世界中完美呈现;且“真实的”实体一直都是业内公认的,这要得益于强大的FEM模拟引擎,知识兔可以针对生物的骨骼、肌肉、脂肪、皮肤等一些有机体进行完美还原!不仅如此,在目前最新版本中还对复制弹性对象以及非有机材料的基础数值方法进行了优化和加强,知识兔可以更加准确且灵活的对其进行各种仿真。此外,本版本还新增了对玛雅2022版本的支持,你可以使用它全新的功能和操作窗口;同时,还加入了一个全新的物理校正功能,现在可以实现将知识兔的目标附件与任何现有的字符进行完美集成,且这种轻量级的方法纠正不需要进行任何复杂的操作以及程序配置,非常友好!而本次为大家分享的是Ziva Vfx For Maya 2022中文破解版,同时还准备了激活程序,你可以参考下面详细的安装激活教学,希望可以帮助到你
安装破解教程
1.在知识兔下载好数据包后进行解压得到安装程序“ziva-vfx-windows-installer_v1-922.exe”,鼠标知识兔双击运行,
2.选择安装位置,默认路径为“C:\Program Files\Ziva\VFX”,知识兔建议最好不要安装到系统盘(C盘)
3.确认无误后知识兔点击“tnstall”进行安装
4.软件安装需要一些时间请耐心等待即可
5.当安装结束后先不要运行软件,知识兔点击“finish”退出安装向导
6.回到刚才下载的数据包中将“fix”文件夹中的破解文件复制到软件安装目录中,默认路径为:C:\Program Files\Ziva\VFX\Ziva-VFX-Maya-Module\ZivaVFX-Maya-1_922\plug-ins
7.在跳出的窗口中知识兔点击第一项“替换目标中的文件”
8.最后运行软件即可开始免费使用咯,破解完成!
Ziva Vfx For Maya 2022新功能
1、使用稳定且可逆的 FEM 进行大时间步长
2、使用多种材料类型,即使知识兔在大变形下也能产生稳健的运动:StVK、NeoHookean、同向旋转、各向异性
3、使用自动碰撞检测和响应来碰撞物体
4、对象之间添加物理附件并在它们附着的地方绘制
5、知识兔将任意三角形网格嵌入到您的模拟实体中
6、模拟薄壳(用于皮肤)
7、绘制肌肉纤维方向,然后知识兔使用脚本化的肌肉激活力激发/收缩肌肉
8、目标弹性实体到外部动画三角形网格,知识兔用于自动添加二次运动
9、油漆几乎所有东西:附着区域、肌肉纤维、肌肉力量、tet-mesh分辨率、材料特性
10、使用多种类型的物理阻尼
11、知识兔将模拟缓存到 RAM 或磁盘以快速播放和/或重新启动
12、即使知识兔在大变形下也能精确保留体积
13、使用玛雅 MEL 或知识兔的开源 Python 工具为您的装备编写脚本和管道
软件特色
一、具有真实物理学的动力学生物
程序正在改变3D角色在电影,游戏和交互式体验中的栩栩如生的方式。知识兔借助程序直观的工具集,艺术家可以复制物理效果并模拟任何软组织材料,知识兔包括肌肉,脂肪和皮肤,轻松创建质量惊人的资产。
1、更好的控制
使您可以使用直观的参数和实际单位模拟任何软组织的重要性。一切都是专门为生物工作而建造的。
2、可扩展的结果
Anatomy Transfer工具可让您快速复制,扭曲和重新定向生物-这样您就可以适应现有的生物并使其繁殖,知识兔以获得无限的英雄品质角色。
3、更快的变化
几乎可以随时追溯应用字符更改。只需适应角色的基本解剖结构,即可使您对更改和最新决定做出更快的反应。
二、复制任何内容的工具集
程序包含一系列开箱即用的艺术家/索具工具,专门用于生物作品。所有输入均基于实际单位,并准确模拟物理和生物学之间的关系。开箱即用,发现复制生物所需的一切。Ziva VFX工具包括
1、嵌入式有限元
所有对象的计算均考虑了嵌入式表面,知识兔从而简化了符合物理原理的四面体模型的创建。
2、材料特性
将无限的真实世界材质层分配给单个对象,知识兔以使实体对象的行为就像真实世界中的对应对象一样。
3、肌肉兴奋
在动画序列中发生肌肉收缩时,使角色的肌肉自动弯曲和射击
4、碰撞
使用自动碰撞检测和有机物体积守恒响应来碰撞对象。
软件优势一、模拟主题
1、物理模拟
程序的核心是一个基于物理的模拟器。作为输入,它需要对场景的物理设置进行完整的描述,知识兔包括:材料、组织体积、骨骼运动、物体之间的依附、重力等等。这是使用设置场景时必须分享的内容。从这个输入,它根据物理定律计算组织和布的运动。这是一个完全耦合的相互作用的所有性质的系统在一次.
2、技术细节
用有限元法对弹性材料进行了建模。求解器使用隐式时间积分和所有隐式力项。隐式集成可以处理时间步长较大的刚性材料和附件。知识兔支持大变形和非线性材料。求解器支持模拟(1)软组织的变形动力学和(2)准静力学。更多信息可在积分器部分。
二、仿真对象
1、骨
骨头是外部动画玛雅网格的任何几何和目的。解决方案不模拟骨头,也不以任何方式修改它们的运动。骨头可能变形和/或动画使用任何玛雅技术。“骨”表面不限于表示生物骨骼,但可以是玛雅会话中任何转换或变形的结果(皮肤集群,关键帧动画,知识兔从Alembic烘焙加载,任何玛雅变形)。一种常见的做法是,它的骨头来自以前烘焙的模拟运行。这样就有可能,比方说,将以前模拟的结果作为一个可变形的“骨头”,然后知识兔使用附件将下一个模拟层限制在它上。通过这种方式,知识兔可以通过将肌肉、脂肪、皮肤等分层来逐步生成动画。每一层都可以是一个单独的解决方案,前一层作为下一层可变形的骨头处理的结果。
2、布
布模型薄的物体(用三角形网格表示),例如:床单,布,薄膜。利用程序解算器对布匹进行了模拟。布适合模拟筋膜和皮肤,但可能不适合服装,因为它缺乏一个自碰撞模型。
3、组织
组织是三维固体变形物体.组织可以用来模拟生物固体,如:肌肉,脂肪,或皮肤。它们也可用于非生物材料,如:果冻、橡胶轮胎、泡沫块和钢梁。从1.4开始,组织支持休息比例尺和压力(见上面的布)。
4、亚组织
亚组织定义了另一个组织中的材料特性、肌肉纤维和附着体。在物理模拟中,亚组织并不表现为它自己的重组网格。这对于几个不同的应用程序都是有用的。正确的方法是把亚组织看作是一种包含在母体组织中的物质。
亚组织可以是在网格内部指定材料属性的工具。虽然材料特性通常通过组织的体积被平滑地插值,人们可以使用一个子组织来指定在一个物体中间对不同的材料性质的不连续的改变。例如,在肌肉的中间可能有一个僵硬的结。
亚组织可以用来模拟埋在被动式组织中的肌肉。例如,整个手臂可以模拟为单个组织,单个肌肉充当亚组织。它们的收缩和不同的刚度将影响单亲组织,而不模拟单独的TET网格。
亚组织可以用来将相邻的肌肉组合成一个单一的模拟对象。如果知识兔使用较少的TET,这可以提高性能。它也可以使索具更容易,因为碰撞和这些肌肉之间的连接不需要设置。因为它们在同一个对象中,所以这都是隐式的。它们不会相对滑动或穿透。
三、碰撞
1、若要启用冲突,有一个“碰撞检测”属性在zSolver节点上。在zT问题、zCloth和zbone节点上也有每个体的碰撞属性。类似附件;碰撞反应可以是软的,知识兔也可以是硬的,固定的或滑动的。
2、只有当两个物体中至少有一个发生碰撞时,两个物体才能碰撞。“碰撞体积”打开电源。除非网格是封闭且水密的,否则,“碰撞体积”属性没有意义,也不应该打开。如果知识兔是为非水密开启,它可能或不正常工作。
3、当两个主体相互作用时,具有更稳定和/或限制性碰撞响应设置的主体定义了交互。当两个物体碰撞时,有效的碰撞刚度是两个物体的设置之间的混合。当滑动接触与固定接触相互作用时,相互作用将是“固定的”。如果知识兔软接触与硬接触交互,则交互将是“硬”的。
4、这个“碰撞点空间”属性在求解器上有时是非常重要的。碰撞是在点对点的基础上处理的,知识兔从三角形网格的顶点开始。有时,这不足以捕获冲突,在这种情况下,知识兔可以通过设置以下方法在冲突处理过程中添加额外的点。“碰撞点空间”到相邻碰撞点之间所需的距离。请注意,知识兔设置这个参数太小可以很容易地产生大量的点,这将大大减慢求解者的速度。如果知识兔您的对象非常大,默认设置可能会发生这种情况。在碰撞过程中,碰撞点在玛雅视口中呈现,因此可以看到碰撞间隔。
四、积分器
1、支持多种数值积分方案,将弹性体的状态从电流演化到下一个时间步骤。积分器的选择由“集成商”属性的ZSolver节点。这些选择在它们之间的取舍上是不同的。稳定度和计算能力精确动力学,如波的传播、振荡、弹跳和“跳”等。知识兔支持四个积分器:隐式后向欧拉,BDF 2,TR-BDF 2和准静态。
2、后向Euler隐式后向欧拉是一个稳定的积分器,只产生很少的动力。这是在V1.5之前的版本中使用的集成器。它是默认的积分器。有时它在数值数学文献中被称为BDF 1。如果知识兔您不需要精确、活泼的软体动力学,请使用此积分器。
3、BDF 2这是一个二阶精确积分器,比后向欧拉具有更好的稳定性和更大的动态性.BDF 2代表“2阶后向差分公式”。使用BDF 2在任何情况下,你想要良好的动力。尽管后向Euler原则上可以随着子步骤的增加(由以下步骤控制)的数目增加而逐渐生成更多的动力学(即更多的次级运动)ZSolver),这在计算上很快就会变得非常昂贵。对于固定的计算预算,BDF 2比后向Euler生成更多的动态。在知识兔对复杂生物的测试中,知识兔观察到BDF 2可以产生与后向Euler相同的动力学量(意思是,视觉上相似的动态效果),而且知识兔计算时间减少了2倍。对于那些组织可能会抖动和振荡的生物来说,这一增益是非常重要的。
4、TR-BDF 2这是麻省理工学院的Klaus-Jurgen Bathe教授在论文中推广的一种预测校正积分器.它是一种混合方案,它结合了一种能量保持方案(隐式Newmark;也称为“梯形方法”,因此称为“tr”)和bdf 2。这种积分器分享了更多的动力比BDF 2,一些小的稳定性损失。在知识兔的一些测试中,知识兔观察到与BDF 2相比,在相同的计算预算下使用tr-BDF 2会产生更好的脂肪折痕和折叠。
5、准静态:有了这个积分器,物体就没有动量,保持在弹性平衡状态,这是由附着物、碰撞和重力决定的。身体会弯曲或伸展,但没有动力。这种积分器在动力学不理想的情况下是有用的,例如,生成混合形状的目标。
五、材料类型
1、StVK材料
这个圣维南-基尔霍夫(StVK)通常给出良好的视觉效果,这是知识兔的默认材料。这种材料在拉伸时变得越来越硬,这在实践中往往是有用的,因为它减少了过度的拉伸。StVK和NeoHookean材料有一个附加参数:抗压强度。这一重要参数控制了组织在大变形条件下的体积保存。请参阅下面的更多评论体积保存.
2、新Hookean材料
新Hookean材料不要在拉伸时逐渐变硬,不像StVK。这是一门很受欢迎的工程用固体材料。他们经常被用来模拟橡胶。
3、共旋转材料
该冠状材料是一种线性组织材料,能够分解大的旋转+在旋转顶部施加少量的变形。一个人也可以应用大变形,但材料将明显地拉伸/压缩,知识兔以小阻力(线性),并没有保持体积。这种材料在计算机图形学和工程领域非常流行–它被许多研究论文和商业系统所使用。与StVK相比,这种材料的速度快了10%,但是在大变形下,StVK看起来更好。
4、各向异性材料
这给出了一种组织材料,它在与给定的各向异性方向正交的平面上更弱(或更强)。各向异性方向可以在空间上变化,并通过肌纤维场。正交方向的相对强度(横向各向异性)是在zT问题节点中指定的,并且知识兔可以假定任何正的实数。值1.0给出各向同性材料,小于1.0的值给出在正交方向较弱的材料,而大于1.0的值给出在正交方向上更强的材料。一个组织球在重力下悬浮,并附着在两个骨头(两个锥)上。各向同性材料和各向异性材料都使用相同的场景参数。各向异性材料在与红色光纤场(RED)正交的方向上弱20倍。因此,在各向异性材料中形成一个可见的凸起。
5、布料
程序中的布料以“Baraff-Witkin”布模型为基础,如D.Baraff和A.Witkin在SIGGRAPH 1998中所描述的,但具有程序专有的弯曲能量模型,这大大提高了模拟的稳定性。布材料是通过规定其拉伸、剪切和弯曲强度来控制的。抗拉强度控制布的抗拉强度或抗压强度,剪切强度控制布的抗剪强度,弯曲强度控制材料的抗弯强度。中性弯曲角可以是零(平),知识兔也可以是输入网格中的角度。
6、分层共混材料
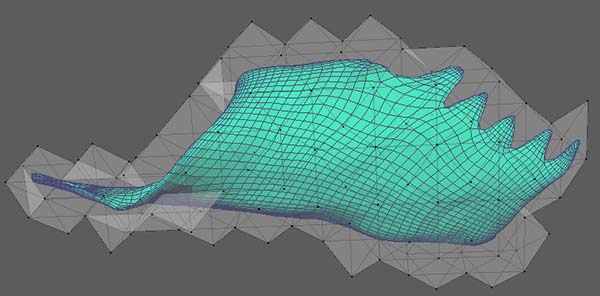
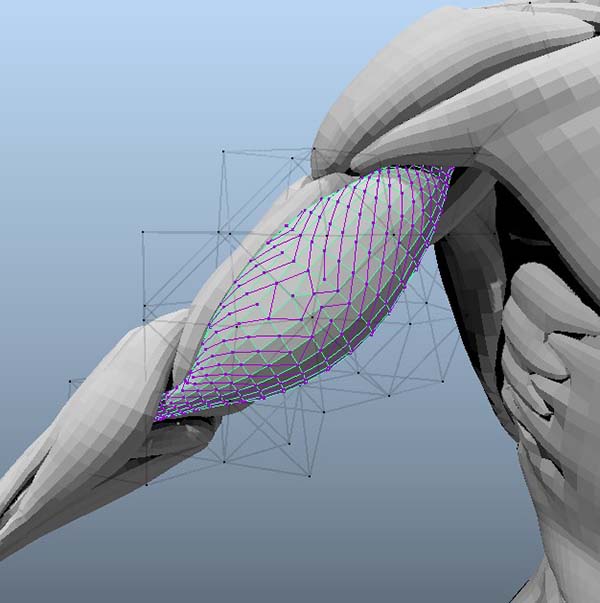
Ziva Vfx For Maya 2022定义在ZMaterialNode上的所有材料特性(例如刚度、体积保持和密度)都可以在弹性物体上变化。这是通过在同一个对象上使用多个zMaterialNode来完成的(参见图)。每个zMaterial节点都定义了一个均匀的材料,但是可画的zMaterial.Weights被用作一个“alpha掩码”来将材料层组合在一起。当权重图为非零时,依赖图中的早期材料被后期材料有效地覆盖。每个对象上的第一个zMaterial必须具有权重=1,因为没有更低的材料层可与之混合。例如,若要制作左侧比右侧硬10倍的实心球,请将默认的杨氏模量分配给基本材料(ZMaterial 1)。然后知识兔,创建一个新的材料(ZMaterial 2),并给它分配10倍更硬的杨氏模量。然后知识兔,为zMaterial2将0.0的值绘制到球体的右侧,但将权重设为1.0,放在球体的左侧。这些空间变化的地图是通过zMaterial.权重绘制在三角形网格表面上的。这些地形图在模拟开始前被平滑地扩展到体积中,然后知识兔转移到四面体网格上。如果知识兔单元网格分辨率明显低于绘制特征的大小,那么这些材料细节将在仿真中不可见。虽然每个对象的物质值可能不同,但单个对象必须只分配一种材料类型(例如,StVK、共旋转、NeoHookean或各向异性)。场景中的不同对象可以有不同的类型。
使用帮助
步骤1:创造一个组织
1、知识兔将当前帧设置为模拟的第一帧(对于新场景,默认为第1帧)。
2、创建Maya多边形(知识兔的工具专门用于多边形几何):Create➞PolygonPrigitives➞Sphere
3、知识兔选择球体
4、知识兔将选定的球体转换为组织:Ziva➞Tissue
5、知识兔将您的时间线延长到5000帧(因此知识兔有很多模拟时间可以玩)
6、观察球体在重力作用下坠落:Tools➞InteractivePlayback
7、调整解算器比例以模拟更大,更动态的球
步骤2:创造一个骨头
1、知识兔将当前帧设置回模拟的第一帧。
2、Ziva Vfx For Maya 2022创建Maya多边形(知识兔的工具专门用于多边形几何):Create➞PolygonPhimitives➞Sphere
3、在“Y”中将新球体转换为3.0个单位(这样新的球体不再与组织球体重叠)。
4、在新球体上冻结变换:修改➞冻结变换(这样知识兔将能够在多次模拟后轻松地将知识兔的骨骼位置“归零”)
5、知识兔将选定的球体转换为骨骼:Ziva➞Bone
步骤3:创建一个布料
1、知识兔将当前帧设置为模拟的第一帧(对于新场景,默认为第1帧)。
2、创建Maya多平面(知识兔的工具专门用于多边形几何):Create➞PolygonPrigitives➞Plane
3、知识兔将平面平移为’X’中的-4个单位
4、知识兔将平面均匀地缩放到值3。
5、知识兔将polyplane的subdivisionWith和subdivisionHeight设置为值10。
6、知识兔选择飞机
7、知识兔将选定的平面转换为布料:Ziva➞Cloth
步骤4:创建一个Subtissue
1、知识兔将当前帧设置为模拟的第一帧(对于新场景,默认为第1帧)。
2、创建玛雅多边形(知识兔的工具专门用于多边形几何):Create➞PolygonPhimitives➞Sphere
3、在’X’中将您的新球体转换为0.7个单位(这样新的球体不再与组织球体重叠)。
4、知识兔将新球体均匀地缩放到0.25的值。
5、知识兔将新球体转换为“组织”。
6、知识兔选择知识兔在之前的“ 创建组织”部分中创建的大组织球体。
7、Shift选择新的较小的组织。
8、执行:➞Subtissue
注意:现在,当您改变“Subtissue”的材料属性(包括肌纤维区域)时,这将作为对父组织的不连续材料变化应用。
步骤5:删除正文
1、知识兔将当前帧设置为模拟的第一帧(对于新场景,默认为第1帧)。
2、创建玛雅多边形(知识兔的工具专门用于多边形几何):Create➞PolygonPhimitives➞Sphere
3、在“Y”中将新球体转换为-3.0个单位(这样新的球体不再与组织球体重叠)。
4、知识兔将选定的球体转换为组织:➞Tissue
5、删除选定的球体:➞Delete选择
注意:应以这种方式删除所有正文。在不使用此菜单项的情况下删除组织,布或骨骼会使场景处于损坏状态。要从模拟中移除主体,但将几何体保留在场景中,请执行:**➞Remove➞Tissue,Cloth或Bone
步骤6:附着组织
1、在组织球上单击鼠标右键,然后知识兔从标记菜单中选择“顶点”。
2、在知识兔组织顶部的一些顶点上拖出选取框选择。
3、按住Shift键选择知识兔的骨骼球体,然后知识兔选择:➞Attachment
4、修改哪些顶点是附件的一部分; 选择组织球体,然后知识兔右键单击以显示该对象的上下文菜单。在右键单击菜单中,导航到:Paint➞zAttachment➞zAttachment1-weights – 然后知识兔像往常一样使用典型的玛雅变形器进行绘制。
步骤7:连接布
1、在布料平面上单击鼠标右键,然后知识兔从标记菜单中选择“顶点”。
2、在布料边缘的某些顶点上拖出选取框选择。
3、按住Shift键选择知识兔的骨骼球体,然后知识兔选择:➞Attachment
步骤8:探索附件
1、知识兔将当前帧设置回模拟的第一帧。
2、知识兔选择组织以使附件可见,然后知识兔选择附件。然后知识兔,您将看到以下附件选项
步骤9:将组织连在一起
1、删除布料以简化知识兔的场景,知识兔选择布料并执行:➞Delete选择
2、在场景中创建一个额外的组织球体,与第一个组织球体偏移。
3、在新组织球上单击鼠标右键,然后知识兔从标记菜单中选择“顶点”。
4、在知识兔组织顶部的一些顶点上拖出选取框选择。
5、按住Shift键选择第一个组织球体,然后知识兔选择:➞Attachment
步骤10:将骨骼嵌入组织内
1、创建一个新场景。
2、知识兔将当前帧设置为模拟的第一帧(对于新场景,默认为第1帧)。
3、创建Maya多边形(知识兔的工具专门用于多边形几何):Create➞PolygonPrigitives➞Sphere
4、知识兔选择球体。
5、在X,Y和Z中将球体缩放为3。
6、知识兔将选定的球体转换为组织:➞Tissue
7、创建一个立方体:Create➞PolygonPrigitives➞Cube
8、知识兔将选定的立方体转换为骨骼:➞Bone
9、知识兔选择骨骼,然后知识兔选择组织并创建附件:➞Attachment
10、知识兔将附件“stiffnessExp”增加到10 ^ 7。
11、知识兔将材料“youngsModulusExp”减少到10 ^ 2。
12、开始交互式模拟:Tools➞Interactive回放 – 然后知识兔移动骨骼,组织将跟随。
步骤11:添加肌肉纤维场
1、知识兔将当前帧设置回模拟的第一帧。
2、要使组织相对于解算器更亮,请将求解器节点在X,Y和Z中缩放为10。
3、知识兔选择组织球体,然后知识兔选择➞MuscleFiber菜单项。
4、要调整光纤场的流量,请导航至:Paint➞zFiber➞zFiber1-endPoints。
5、现在,您必须通过选择性地绘制值为0.0的曲面顶点和“out-points”来指定“入点”,方法是选择性地绘制值为1.1的其他顶点。- 允许使用一些有价值的余地,知识兔以便使用压敏敏感绘图片的用户更容易。
6、在模拟运行时以交互方式点燃肌肉; 让知识兔将polyCube连接到zFiber激发。首先让知识兔创建一个polyCube。这可以在以下菜单中找到:Create➞PolygonPrigitives➞Cube。
7、现在使用连接编辑器或通过执行以下MEL行连接立方体的“translateY”属性到zFiber1节点的“激发”属性:connectAttr -f pCube1.translateY zFiber1.excitation;
步骤12:添加其他材料
1、知识兔将当前帧设置回模拟的第一帧。
2、让知识兔软化当前的材料。在当前组织的历史中找到zMaterial节点
3、知识兔将“youngsModulusExp”的值减小到10 ^ 1的值。
4、然后知识兔在组织的zTet节点上; 将权重泛洪到值1.0并将“tetSize”设置为0.4。
5、在起始帧处,知识兔选择组织球体左侧的顶点,然后知识兔选择➞MaterialPlayer菜单项(这将在预先存在的材料上“分层”新材料节点并将其重量增加到所选顶点的值为1.0)。
6、如果知识兔要调整zMaterial2如何遮挡基础zMaterial1节点的属性,请在组织上方的右键单击上下文菜单中,导航到:Paint➞zMaterial➞zMaterial2-weights – 然后知识兔修改绘制的地图。
7、在Ziva Vfx For Maya 2022当您开始模拟时,您现在将看到组织球的一半现在明显更柔软并且知识兔在重力下下垂
下载仅供下载体验和测试学习,不得商用和正当使用。